Overview
While autonomous robots have seen significant research advancements in recent years, due to the harsh nature of underwater environment, there is limited availability in finding off-the-shelf underwater robots for various applications. Custom-built underwater robots may be necessary for specialized applications or missions, but the process can be more costly, time-consuming, and requiring expert knowledge. This challenge makes validation and verification process difficult. To address these challenges, we propose a modular underwater robot that can serve as an open-source testbed system that is customizable and subject to environmental variability.
Research Goals
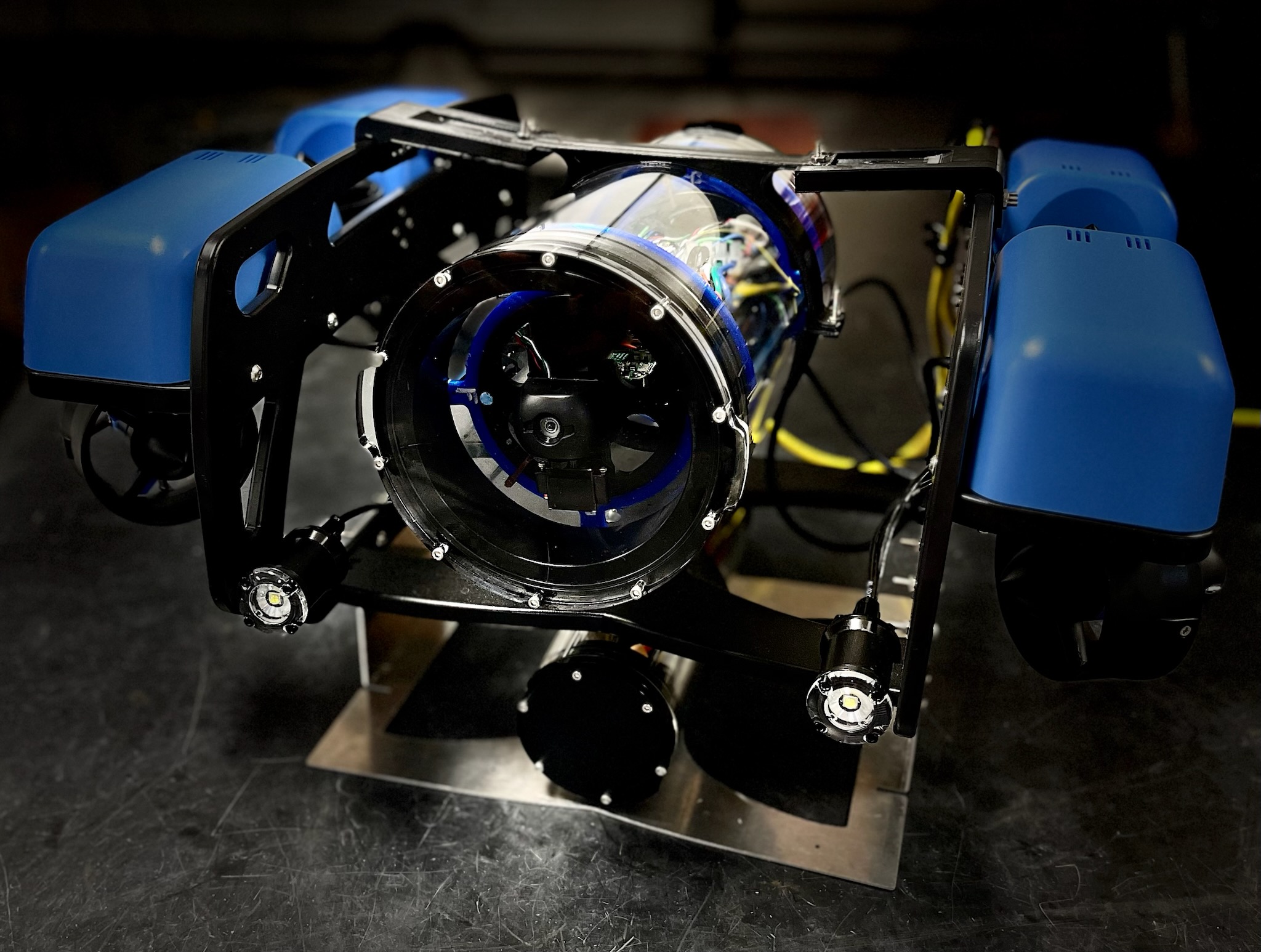
- Mechanical team aims to design based on BlueROV2’s design (from BlueRobotics).
- Electrical team aims to design PCBs that can manage different sensor and actuator configurations.
- Software team aims to design a software system that can operate easily with ROS system.
Related Publications
- B. Herrin, V. Close, N. Berner, J. Herbert, J. Mindlin, S. Paez, R. James, and J. Shin, “Submodical: Modular underwater robot for rapid development and validation of autonomous systems,” in OCEANS 2023, Gulf Coast (Abstract Accepted)
Research Team
PI: Jane Shin
Team Lead: Victoria Close, Baker Herrin
EE Team: Ryan James, Ethan Reussow, Cale Woodward
ME Team: Nathan Berner, Josh Hebert
CS Team: Jared Mindlin, Sebastian Paez